
🧭 About Me
Hello! I am Rui Qian, a Master’s student in Computer Control and Automation at Nanyang Technological University (NTU), Singapore, supervised by Prof. Lihua Xie.
My research interests lie at the intersection of 3D Computer Vision and Robotic Perception. My core academic ambition is to advance machine spatial intelligence, focusing on how autonomous agents can perceive, comprehend, and interact with our complex and dynamic 3D world in a manner akin to humans.
I am particularly interested in semantic scene understanding and developing advanced scalable 3D representation methods, such as the involving 3D Gaussian representations. I believe that true autonomy hinges on a machine’s ability to reconstruct (geometry) and understand (semantics) a persistent internal model of its environment.
In the long term, I aim to bridge geometric perception and semantic reasoning. I am passionate about developing foundation models for 3D world understanding to empower future robotic and Embodied AI systems. My goal is to enable these agents with higher-level reasoning capabilities, allowing them to build persistent, high-fidelity digital twins of their environment and ultimately, to seamlessly connect the physical and virtual worlds.
🔥 News
- 2025.11: 🎉🎉 One paper on Occupancy Networks is accepted to AAAI 2026 as Oral!
- 2025.09: Currently seeking a PhD position, Research Assistantship, or Internship!
📝 Publications
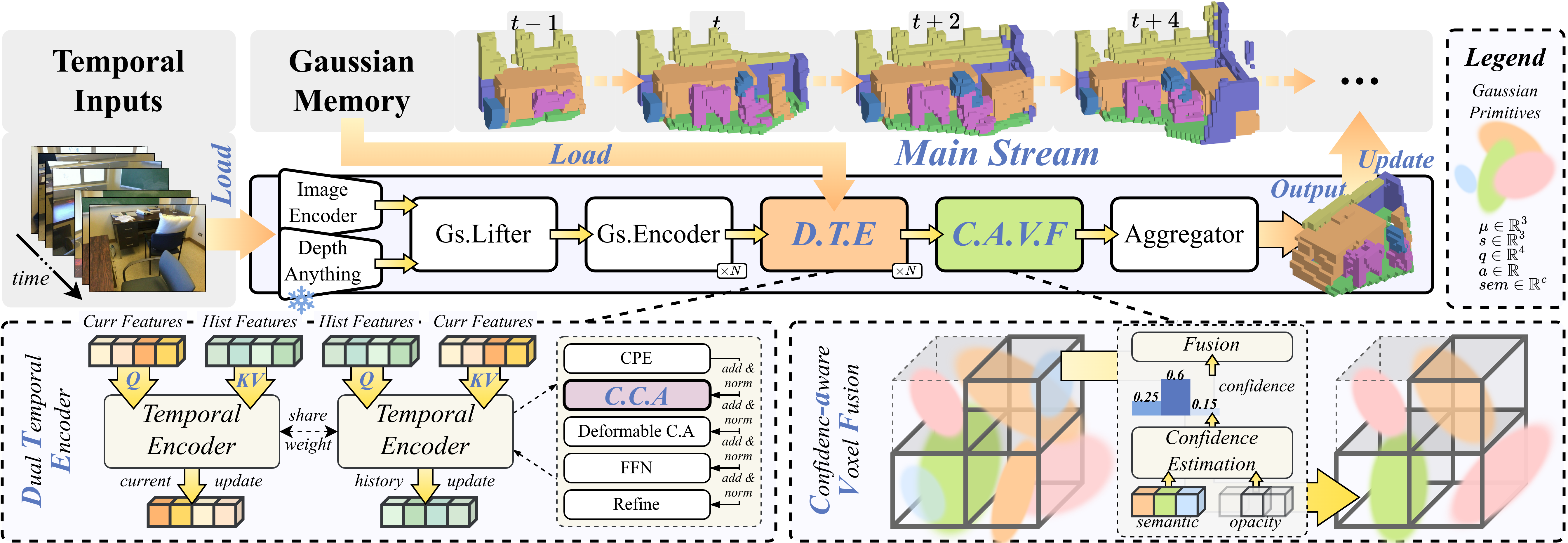
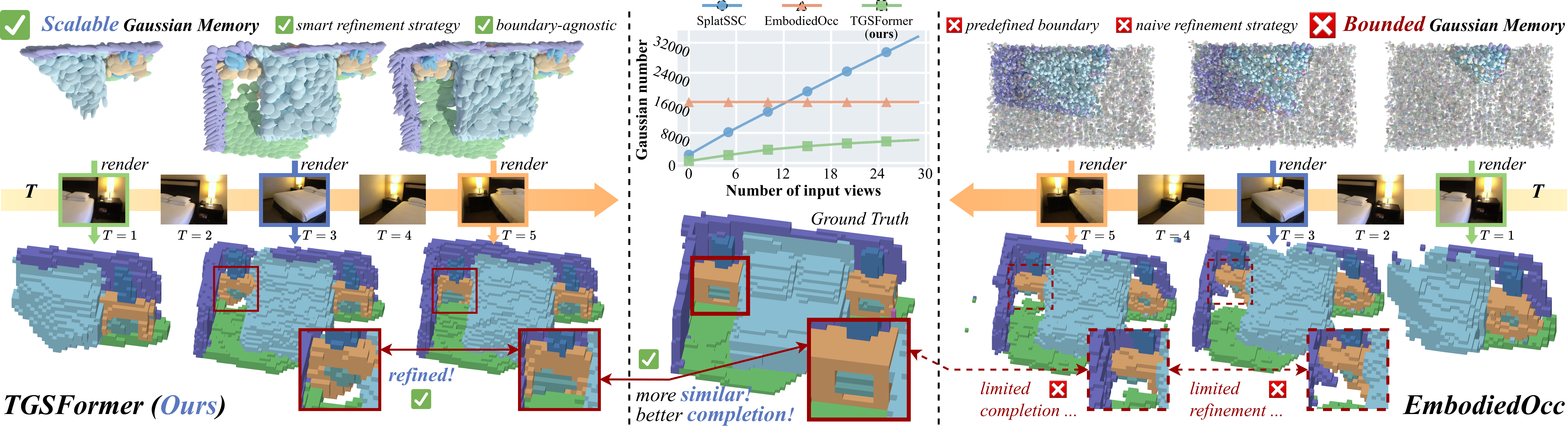
TGSFormer: Scalable Temporal Gaussian Splatting for Embodied Semantic Scene Completion
Under Review
Rui Qian*, Haozhi Cao*, Tianchen Deng*, Tianxin Hu, Weixing Guo, Shenghai Yuan, Lihua Xie
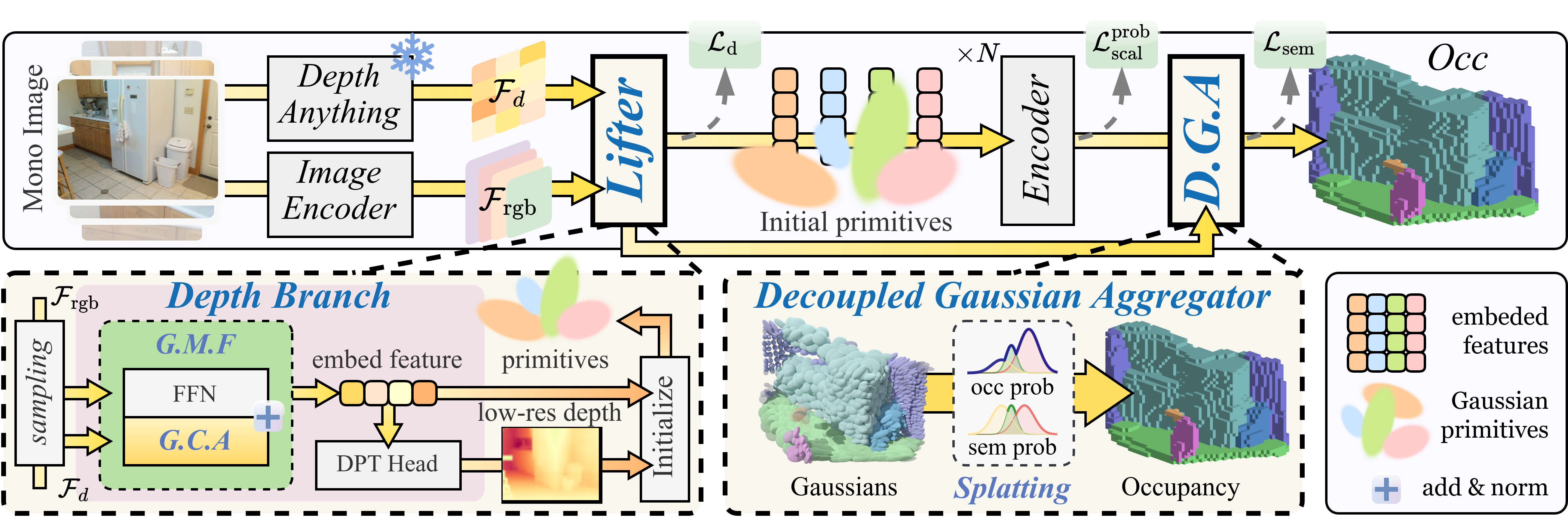
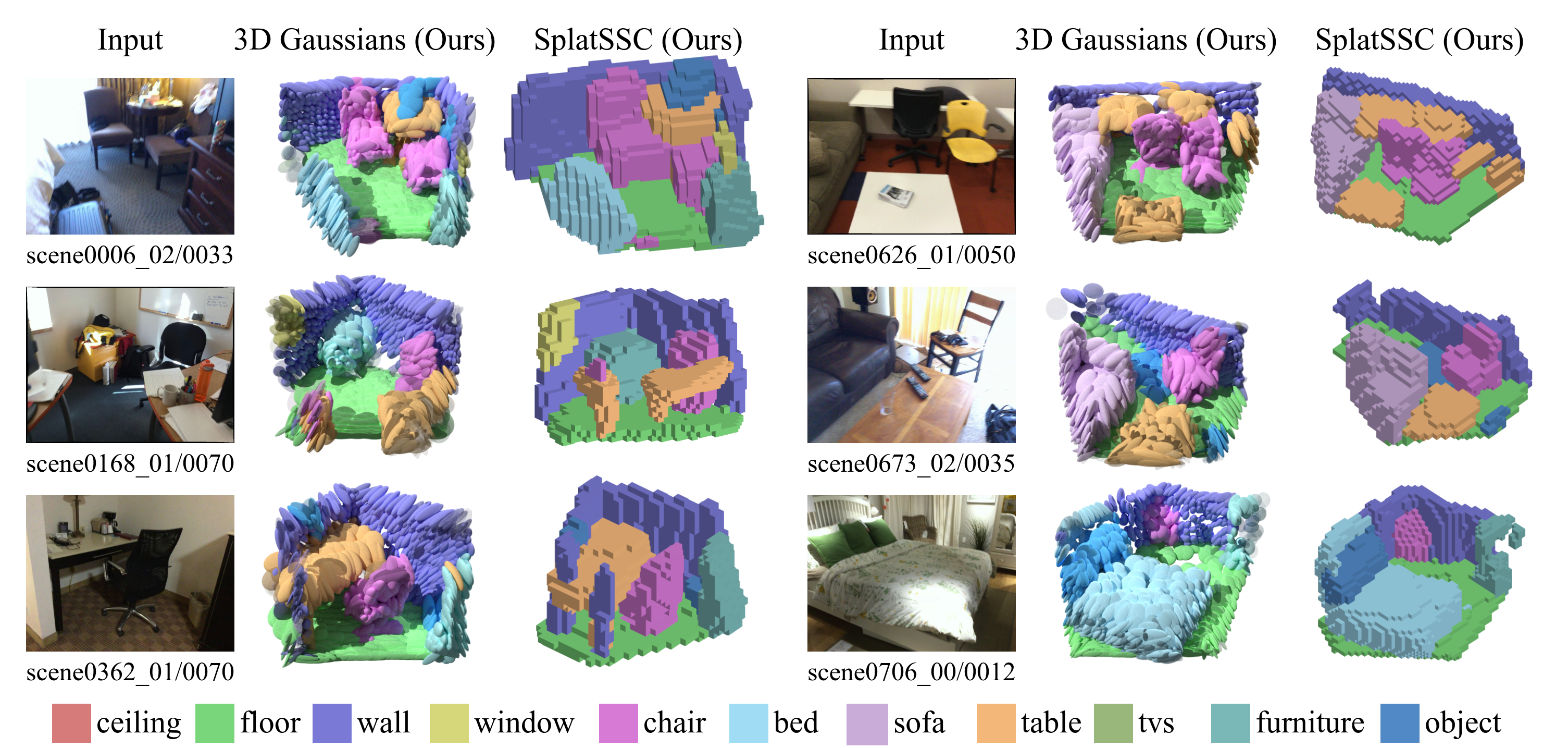
SplatSSC: Decoupled Depth-Guided Gaussian Splatting for 3D Semantic Scene Completion
AAAI (Oral) 2026
Rui Qian*, Haozhi Cao*, Tianchen Deng, Shenghai Yuan, Lihua Xie
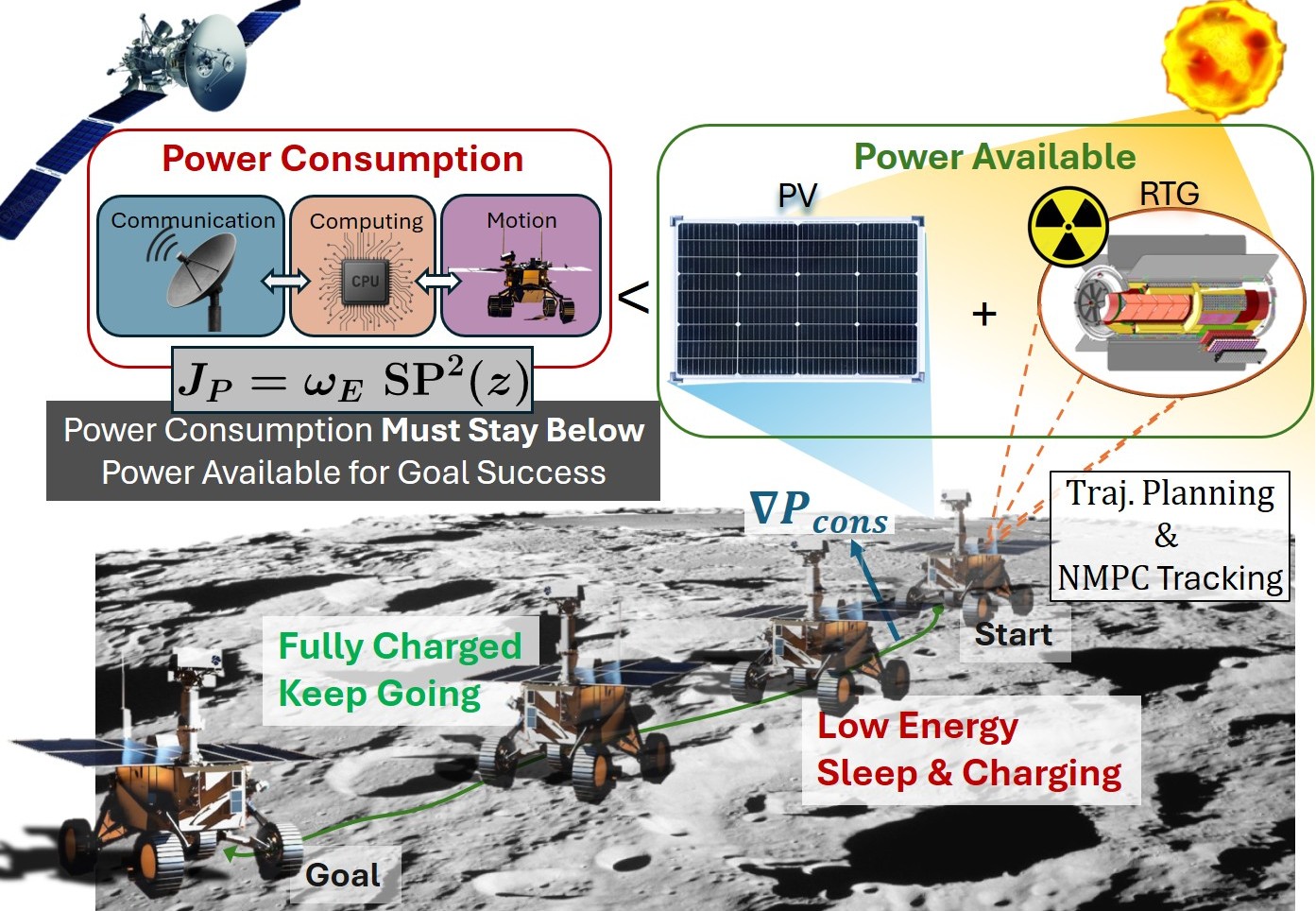
Energy-Constrained Navigation for Planetary Rovers under Hybrid RTG-Solar Power
Under review for an international robotics conference
Tianxin Hu*, Weixiang Guo*, Ruimeng Liu, Xinhang Xu, Rui Qian, Jinyu Chen, Shenghai Yuan, Lihua Xie
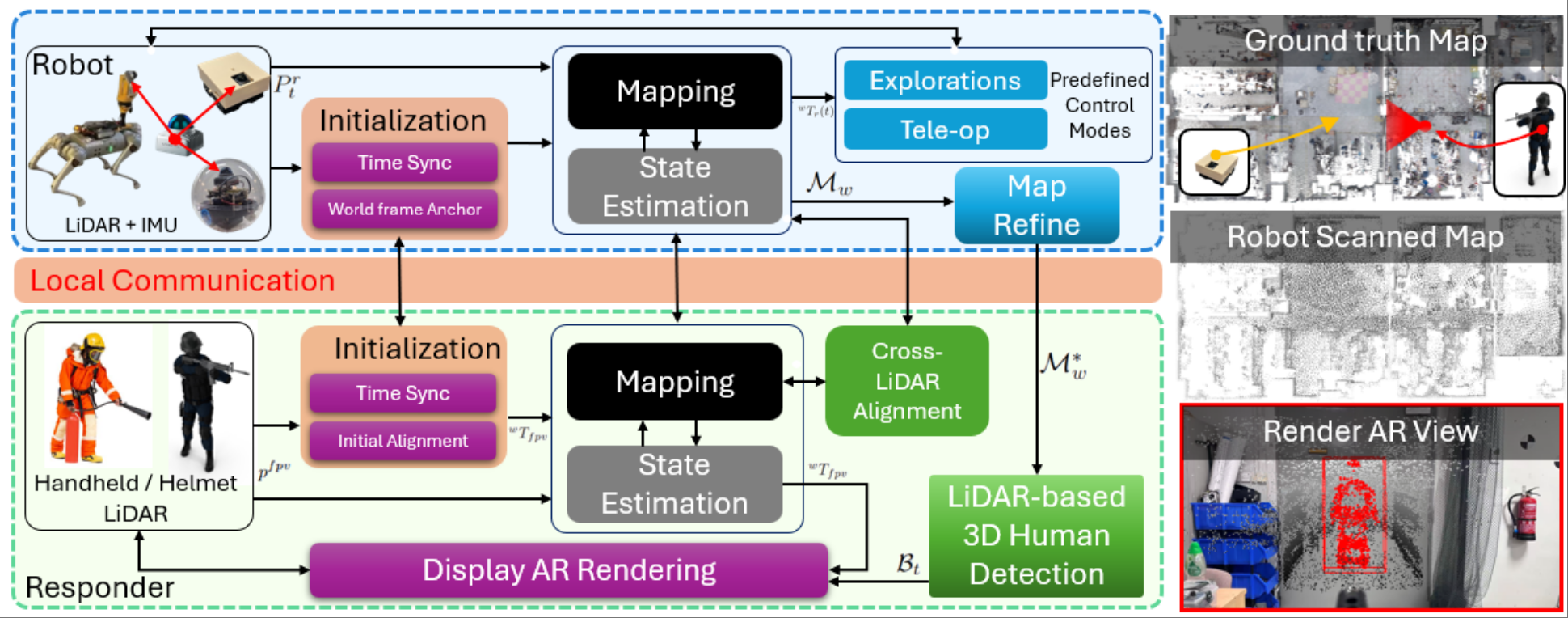
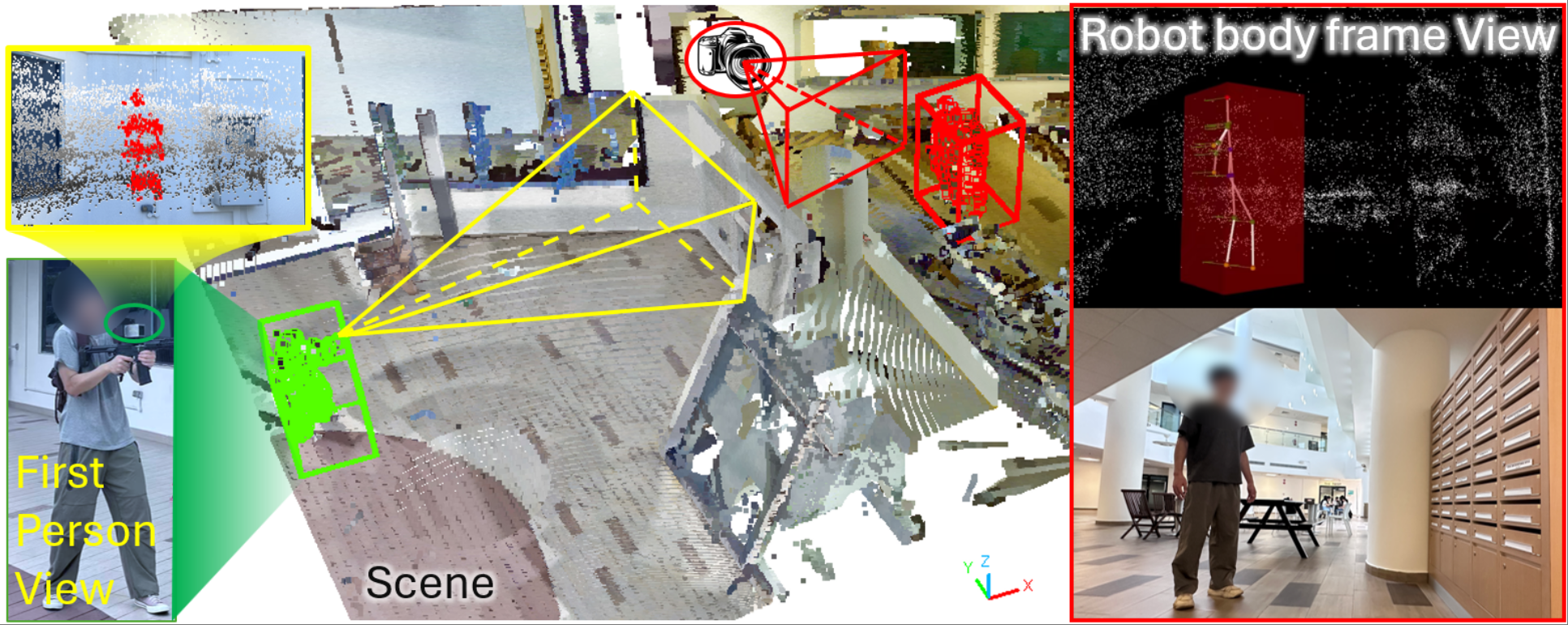
STARC: See-Through-Wall Augmented Reality Framework for Human-Robot Collaboration in Emergency Response
Under review for an international robotics conference
Shenghai Yuan*, Weixiang Guo*, Tianxin Hu, Yu Yang, Jinyu Chen, Rui Qian, Zhongyuan Liu, Lihua Xie
🎖 Honors and Awards
[A1] (Provincial Level)
Jiangsu Provincial Excellent Undergraduate Thesis (or Design)
Oct 2024
Jiangsu Provincial Department of Education
📖 Educations
- 2020.010 - 2024.06, Changzhou University, Changzhou, China, Bachelor of Electronic Information Engineering.
- 2024.08 - now, Nanyang Technological University, Singapore, Master of Computer Control and Automation.